To produce a robotic hand section for use on a large-volume production line.
Goals
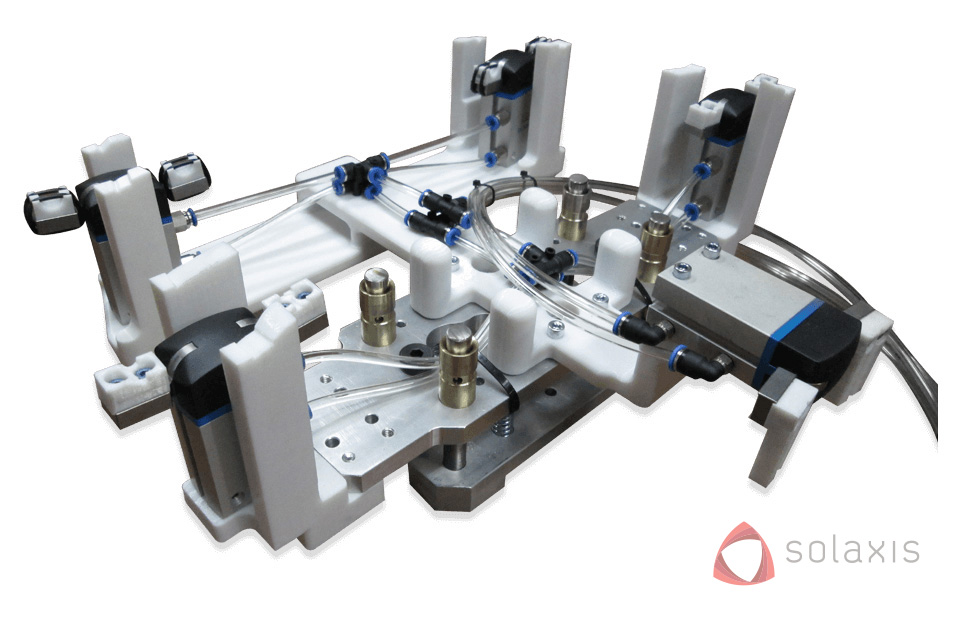
To reduce the weight of large-size (16” x 14”) robotic end-of-arm tooling that needed to be able to move quickly, with weight being the key issue.
To integrate mechanical and vacuum-based gripping systems.
Results
Proposal of a hybrid solution combining aluminum (traditional tooling) and thermoplastic (3D printing), in order to deliver a robotic hand that would be both hard-wearing and lightweight.
Considerable weight reduction.
The assembly has been working smoothly for many years.